위성 탑재장치
제어모멘텀자이로 제어장치
CMGC
Control Momentum Gyro Controller
제품 상세
제어모멘텀자이로 제어장치
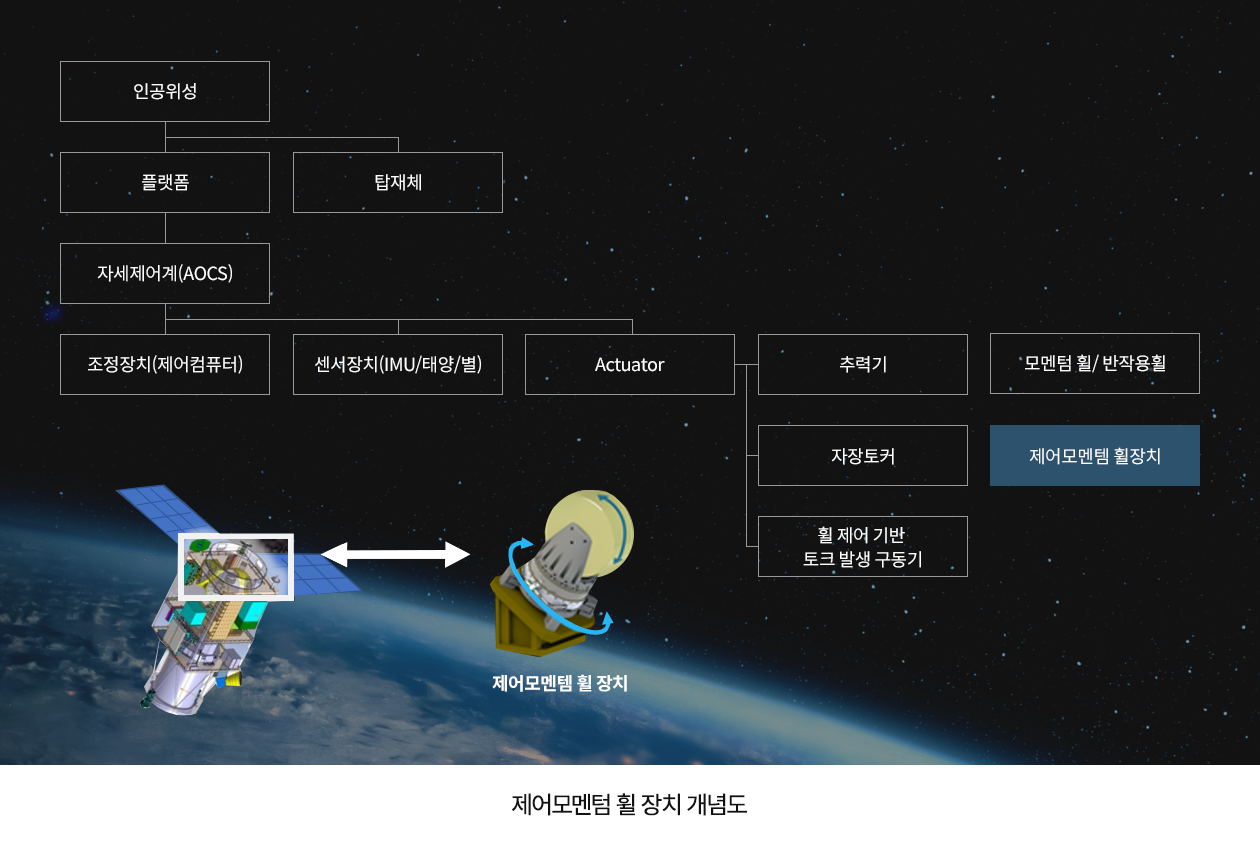
위성 제어 모멘텀 자이로는 위성 본체 자세제어계 (AOCS: Attitude and Orbit Control System)에 포함된 구동장치로, 기존의 인공위성 자세제어를 위하여 반작용 토크를 발생하는 반작용 휠 (reaction wheel)을 대체할 차세대 위성 구동 장치입니다.
장치의 구성
제어모멘텀 휠 장치는 각운동량을 발생시키는 모멘텀 휠, 각운동량의 방향을 변화시키는 김발구동장치, 모멘텀 휠과 김발구동장치를 구동/제어하는 제어기, 제어모멘텀 휠 장치에서 발생하는 진동이 위성체로 전달되는 것을 저감 시키는 진동흡수장치로 구성됩니다.
제어기는 제어모멘텀 휠 장치에 전원을 공급하고, 상위 체계로부터 명령을 받아 장치를 제어하는 장치로, 전원보드조립체, 제어보드조립체, 구동보드조립체로 구성되어 있습니다. 전원보드조립체는 상위 체계로부터 입력된 전원을 제어기에서 사용하는 전원으로 변환하여 공급합니다. 제어보드조립체는 FPGA를 기반으로 모터를 제어하며, 제어모멘텀 휠 장치에서 제어기로 입력되는 신호와 제어기 온도, 전류 등의 아날로그 신호들을 수집합니다. 구동보드조립체는 제어모멘텀 휠 장치로부터 신호를 입력 받아 제어모멘텀 휠 장치를 제어합니다.
장치의 경쟁력
당사는 국내 위성사업에서 전량 수입에 의존하던 제어 모멘텀 휠 제어기 부분의 국산화를 통하여, 기존 제품 대비 경량화/소형화 등 성능과 가격에서 경쟁력 우위를 확보하였으며, 내방사선 설계가 반영된 부품을 차용하여 위성의 QM (Qualification Model), FM (Flight Model)에 바로 반영 가능합니다.
제원
ㆍ대상위성: 400 – 600 kg 중형위성급
ㆍ크기: 250 x 230 x 95 mm
ㆍ무게: < 4.0 kg
ㆍ소모전력: < 15 W
ㆍ제어가능 회전 속도: < 6000 RPM
ㆍ제어 정밀도: 14 bits, 8ch 동시
ㆍ내방사선: < 35 krad